




How to Control Brushless DC Motor
Time:2023-04-14
Views:1082
Brushless direct current (BLDC) motors have been widely used in fields such as household appliances, industrial equipment, and automobiles. Compared to traditional brushless motors, although brushless DC motors can provide a more reliable and maintenance free alternative, they require more complex electronic devices for driving. This article will explore various different technologies, sensor schemes, and popular algorithms used to drive brushless DC motors. In addition, some motor driver ICs from leading suppliers and suitable development and prototype design resources will also be introduced.

Brushless motor applications
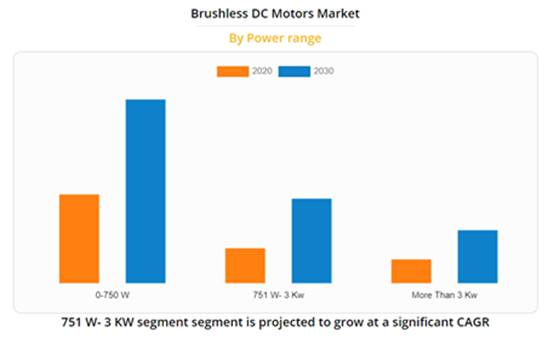
In the past decade, brushless DC motors have become very popular, and their applications may be more common than Wi Fi. Whether at home, in the office, or in surrounding scenarios such as cars, you may be surprised to find these brushless DC motors. Allied Market Research estimates that the global brushless DC motor market will increase from $33.2 billion in 2020 to $72.2 billion by 2030 (see Figure 1). Its "2030 Brushless DC Motor Market Research" report predicts a compound annual growth rate of 10.3% for all rated power motors, with brushless DC motors in the 750-3000W category experiencing the most significant compound annual growth rate.
Figure 1: Allied Market Research (AMR) released the growth trend of the brushless DC motor market from 2020 to 2030. (Source: AMR, https://www.alliedmarketresearch.com/brushless-dc-motors-market , permission requested)
Brushless DC motors are suitable for various applications, including battery powered power tools, household vacuum cleaners, wireless remote control drones and electric vehicles, as well as hundreds of industrial applications from conveyor belts to production robots.
Brushless DC motors are popular due to their low maintenance characteristics, and their energy efficiency is usually as high as 92%, which is at least 10% to 15% higher than similarly sized brush motors. In addition, due to the absence of any brush friction, BLDC can operate at higher speeds. Removing brushes also helps to achieve a more compact size, lower audible noise, and significantly reduce EMI. These characteristics make them ideal power transmission components for electric vehicles, as high torque and high-speed performance are crucial in electric vehicles.
However, the advantages of BLDC also need to be considered in conjunction with its high cost and complex driving requirements. Figure 2 compares different popular types of motor configurations and shows their advantages and disadvantages. Although the operation and internal structure of the stator winding of brushless DC motors are slightly different, they are very similar to permanent magnet synchronous motors (PMSM).
Figure 2: Product types used to illustrate the main advantages and disadvantages of popular DC motors. (Source: Qorvo)
How does a brushless DC motor work?
Before exploring how BLDC and PMSM work, let‘s briefly introduce some basic motor terminology:
Winding: A winding refers to a copper wire coil placed on the stator or rotor, which acts as an electromagnet and can generate a magnetic field according to the direction of the current. The three windings of the brushless DC motor in Figure 2 can be connected in series to construct a single-phase motor, or separately to construct a three-phase brushless DC motor.
Rotor: The rotor refers to the rotating component of a motor. The winding around the rotor receives energy through a brush motor brush. In a brushless motor, the winding is on the stator and a permanent magnet surrounds the rotor. There is a small air gap between the rotor and stator.
Stator: The stator is the non rotating part of the casing motor. Figure 2 shows the stator magnetic poles of a brushless motor. If compared to BLDC, the stator in BLDC contains non rotating windings.
Commutation: Rotation is achieved by changing the direction of current in the winding.
Back electromotive force: Back electromotive force is the electrical energy generated by a winding when passing through a magnetic field. In the case of a brushless DC motor, the back electromotive force comes from the permanent magnet of the rotor, which can be used to sense the position of the rotor relative to the stator winding, thereby driving the commutation process.
The difference between permanent magnet synchronous motors and brushless DC motors mainly lies in the shape of their stator windings and the resulting back electromotive force waveform characteristics (see Figure 3).
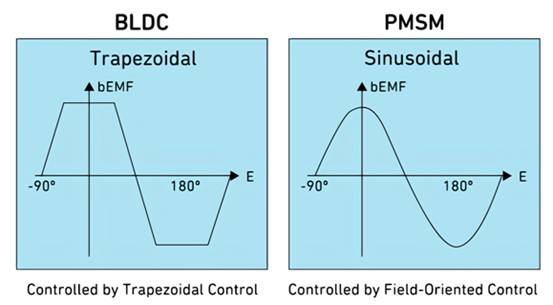
Figure 3: Comparison of back electromotive force waveforms generated by BDLC and PMSM motors. (Source: Qorvo)
Motor drive algorithms and sensors
The rotation of a brushless DC motor or permanent magnet synchronous motor requires commutation of the driving signal applied to the stator winding. A motor drive controller (commonly referred to as a driver) based on semiconductor devices generates waveforms, and the number and shape of waveforms depend on the type and number of phases of the motor. As shown in Figure 3, compared to the sinusoidal method with field oriented control (FOC) used in permanent magnet synchronous motors, brushless DC motors are suitable for trapezoidal driving waveforms. In three-phase PMSM, commutation utilizes three sine wave waveforms with a phase difference of 120 degrees from each other. BLDC motors can also be driven using a sine wave shape.
Whether using FOC or trapezoidal drivers, effective rotor control requires precise knowledge of the position of the rotor relative to the stator winding, which can provide important feedback for motor drive in order to better control motor speed and torque. The position information determines the order, time, and frequency of the driving signal.
There are two methods for determining the position of the rotor: sensor or sensorless.
Sensors: Hall effect sensors can be arranged next to each stator winding (see blue small square in Figure 2), and can detect changes in magnetic field polarity (N to S, S to N) as the rotor rotates. Each three-phase motor requires three sensors.
Sensorless: The sensorless method uses the back electromotive force to determine the rotor position, rather than using a sensor.
Both sensing methods have their own advantages and disadvantages. The use of Hall effect sensors involves additional component costs and assembly time, but BLDC/PMSM motors using sensor sensing can provide excellent torque, smooth rotation, and higher efficiency. The drive controller of permanent magnet synchronous motors is often more complex, and using FOC requires the use of sensors.
Sensorless methods are common in brushless DC motors, which can achieve attractive low prices, but require algorithms to determine the rotor position based on the induced back electromotive force in the stator winding. A major challenge for sensorless BLDC motors arises when starting, as there is no back electromotive force due to no movement, so another method must be used to calculate the position of the rotor. Usually, the high-frequency drive signal is fed to each phase winding and the position is calculated accordingly through a specific algorithm.
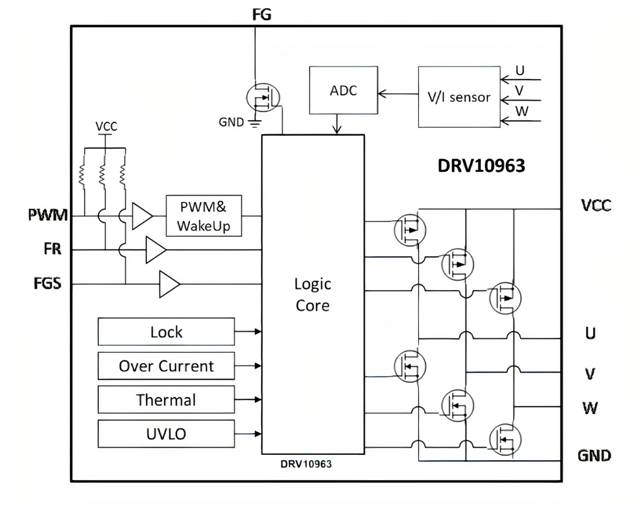
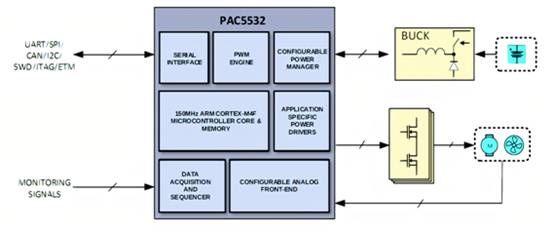
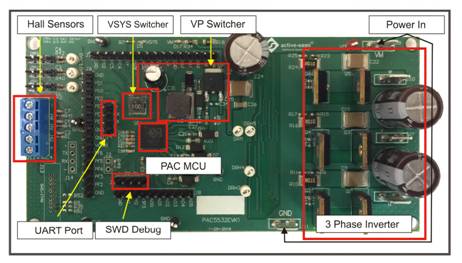
Figure 4: A simplified diagram of a three-phase BLDC motor, in which Hall effect sensors are used to create the commutation process and sort the inverter operations. (Source: Qorvo)
Figure 4 highlights a simple three-phase BLDC motor configuration using Hall effect sensors (HSW, HSV, and HSU). Sensors are basically digital switches that indicate the polarity of the detected magnetic field, with N equal to "1" and S equal to "0". The outputs of three sensors are combined to provide a 3-digit logical "opcode" that indicates the position and direction of the rotor when it changes. This information is the basis for the three-phase power transistor inverter stage to provide driving signals. For BLDC applications with relatively low power, sensor interfaces, motor controllers, and drive transistors are typically integrated into a single controller IC. High power motors typically use gate drive outputs from controller ICs and power MOSFETs equipped with heat sinks to achieve the required driving current.
In order to change the speed of the motor, pulse width modulation (PWM) technology can be used to change the duty cycle, which is the ratio of pulse on/off. This method can limit the starting current, so using it during motor startup can also provide significant advantages.
BLDC Motor Drive IC and Development Resources
Figure 5 shows the functional block diagram of a low-power sensorless three-phase BLDC motor driver TI DRV10963, which includes three power MOSFETs suitable for BLDC motors up to 5V/0.5A and can be used to drive cooling fans used on laptops and high-performance processors. DRV10963 has short-circuit and overcurrent protection functions, and monitors the current and voltage of each MOSFET through a multiplexed analog-to-digital converter (ADC). PWM input can be used to control and achieve the desired motor speed. The "FR" input allows for changing the motor direction during startup, while the "FG" output provides motor speed information.
Figure 5: Functional block diagram of TI DRV10963 5V three-phase sensorless BLDC motor driver. (Source: TI)
Microchip offers a comprehensive range of single chip BLDC motor drivers and gate driver ICs, with MCP8063 being one example. It is a three-phase brushless sinusoidal sensorless motor driver designed specifically for automotive cooling fans and various pump applications.
The Qorvo PAC5532 power controller is suitable for a wide range of high-speed consumer products, industrial and automotive motor control applications, including battery powered electric tools, electric bicycles, and light hybrid vehicles. PAC5532 is suitable for 48-120VDC systems, integrated with a 150MHz Arm Cortex-M4F 32-bit kernel, and has comprehensive and configurable power management and driver functions (see Figure 6).
Figure 6: Simplified configuration diagram of Qorvo PAC5532 in battery powered motor control applications. (Source: Qorvo)
The Qorvo PAC5532EVK1 evaluation kit can provide supplementary support for PAC5532.
Figure 7 (source: Qorvo) lists the main components of the evaluation kit, including PAC5532 and three-phase half H-bridge inverter components. The GUI based software development kit can be downloaded from Qorvo website.
Another motor control IC is the high-performance Renesas RA6T2 microcontroller series. This IC is based on the 240MHz Arm Cortex-M33 microcontroller core, including a hardware based accelerator for accelerating complex motor control algorithms and running security encryption functions. It also integrates a very complete set of analog functions, including a 12 bit analog-to-digital converter (ADC), a 12 bit analog-to-digital converter (DAC), a programmable gain amplifier, and a high-speed comparator (see Figure 8).
Figure 8: Functional block diagram of motor controller based on Renesas RA6T2 microcontroller. (Source: Renesas)
The Renesas MCK-RA6T2 evaluation kit provides a convenient and practical prototyping method for brushless motor driver design. This kit includes three connection boards: inverter board, microcontroller board, and communication board, as well as a small brushless DC motor and all necessary cables. The functional architecture of MCK-RA6T2 is shown in Figure 9.
Figure 9: Functional block diagram of Renesas MCK-RA6T2 brushless motor evaluation kit. (Source: Renesas)
Start BLDC motor control design
In this article, we explored how brushless motors operate, discussed the main reasons for their popularity in the market, and highlighted some application cases. The leading semiconductor solution introduced above provides you with a user-friendly, fully documented, and trustworthy technical approach that can help you start your first BLDC/PMSM design.
|
Disclaimer: This article is transferred from other platforms and does not represent the views and positions of this site. If there is any infringement or objection, please contact us to delete it. thank you! |





 Business consulting
Business consulting
 13823761625
13823761625 Mail me
Mail me