
技術分享
什么是有感?什么是無感?無刷直流電機的有感和無感的區(qū)別
發(fā)布時間:2023-10-09 11:04:39 瀏覽:794次
什么是有感?
在有感無刷中的有感是指“霍爾傳感器”,那么什么是“霍爾”呢?霍爾是指的霍爾效應,這一現象是美國物理學家霍爾(A.H.Hall,1855—1938)于1879年在研究金屬的導電機構時發(fā)現的。當電流垂直于外磁場通過導體時,在導體的垂直于磁場和電流方向的兩個端面之間會出現電勢差,這一現象便是霍爾效應。這個電勢差也被叫做霍爾電勢差。簡單來說,就是通過霍爾傳感器,無刷驅動器可以明確知道無刷電機的轉子的位置。
什么是無感?
在無感無刷中的無感是指“無霍爾傳感器”,在沒有直接反饋的情況下,無感無刷電機只能通過間接方式獲取電機轉子位置,常見的方法有反電動勢法、電感法、磁鏈法、高頻脈沖法及其它智能方法,應用最多的是反電動勢法。
無感無刷電機在啟動時因為不知道轉子磁極方位,只能隨機變換電流去驅動電機,相似于“蒙”,總有一個時分轉子會滾動起來,而轉子滾動起來之后,就能靠線圈上的電流改變來核算轉子的方位,然后操控電流與方向。這就是為什么無感無刷在起步時,總是有“咔咔咔"的癥狀。
與有感無刷則不同,有了傳感器,驅動器從一開機就知道轉子磁極方位,直接就能給對應的線圈供給對應的電流,以驅動轉子??墒请娏骱苄r,電機就會發(fā)出持續(xù)的"吱吱吱"的聲響。這就是為什么有感電機在低速時會聽到持續(xù)地"吱吱吱"的聲響,而無感無刷則不會。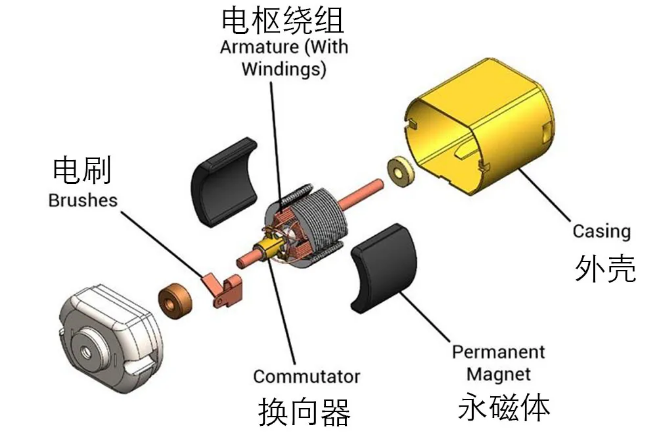
內部結構圖
有感無刷的優(yōu)缺點
優(yōu)點:電機的線性更佳,速度穩(wěn)定性強,響應性高。
缺點:造價高,且不容易做防水。受霍爾傳感器局限,容易受到干擾,讓驅動器接收到錯誤信息而導致故障,故而驅動器到電機的線長限制一般在5米以內。
無感無刷的優(yōu)缺點
優(yōu)點:沒有傳感器,成本更低,線長不因霍爾因素影響而受到限制。
缺點:線性不如有感無刷電機,另外在市面上的驅動器因為轉速沒有準確的反饋,誤差會在±20轉以上。帶載、滿載啟動容易抖動或啟動失敗。
有刷電機與無刷電機調速方式的區(qū)別
實際上兩種電機的控制都是調壓,只是由于無刷直流采用了電子換向,所以要有數字控制才可以實現了,而有刷直流是通過碳刷換向的,利用可控硅等傳統(tǒng)模擬電路都可以控制,比較簡單。
1、有刷馬達調速過程是調整馬達供電電源電壓的高低。調整后的電壓電流通過整流子及電刷地轉換,改變電極產生的磁場強弱,達到改變轉速的目的。這一過程被稱之為變壓調速。
2、無刷馬達調速過程是馬達的供電電源的電壓不變,改變電調的控制信號,通過微處理器再改變大功率MOS管的開關速率,來實現轉速的改變。這一過程被稱之為變頻調速。
- 上一篇:霍爾效應電流傳感的趨勢
- 下一篇:磷酸鐵鋰電池:電池掉電(電壓回落)的具體原因

關注矽源特公眾號
矽源特微信客服
 發(fā)送郵件
發(fā)送郵件 商務QQ客服
商務QQ客服 13823761625
13823761625
